หลังจากที่ออกแบบและสร้าง Inverted pendulum ตัวใหม่ออกมา(อันนี้ คือ ตัวเก่า)แล้วและทำการควบคุมมัน ซึ่งผลที่ได้เป็นที่น่าพอใจอย่างมาก ซึ่งตอนนี้มันก็สามารถควบคุมได้แล้ว การควบคุมแบบนี้เรียกว่า State feedback คือ Control law u=-kx โดยที่ x คือ state variable ซึ่งใน Inverted pendulum system x ก็จะมีทั้งหมดสี่ตัว คือ cart position,cart velocity,pendulum angle และ angular velocity ซึ่งเมื่อเราสามารถวัดมาได้ครบ เราก็ทำการออกแบบหาค่า K ด้วยวิธี Pole placement/LQ เมื่อออกแบบหาค่า Kแล้วก็นำมาเขียนลงใน Digital signal processing PIC18F4431

รูปที่.1 อุปกรณ์สำหรับการทดลองทั้งหมด
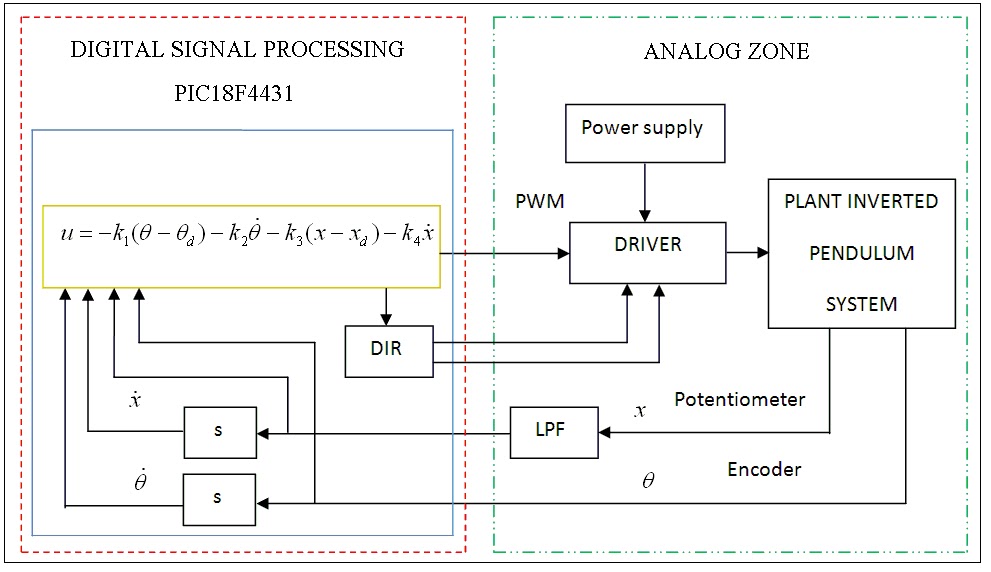
รูปที่.2 STATE FEEDBACK CONTROL DIAGRAM
สถานที่ถ่ายทำ ภาควิชาวิศวกรรมเครื่องกล มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี
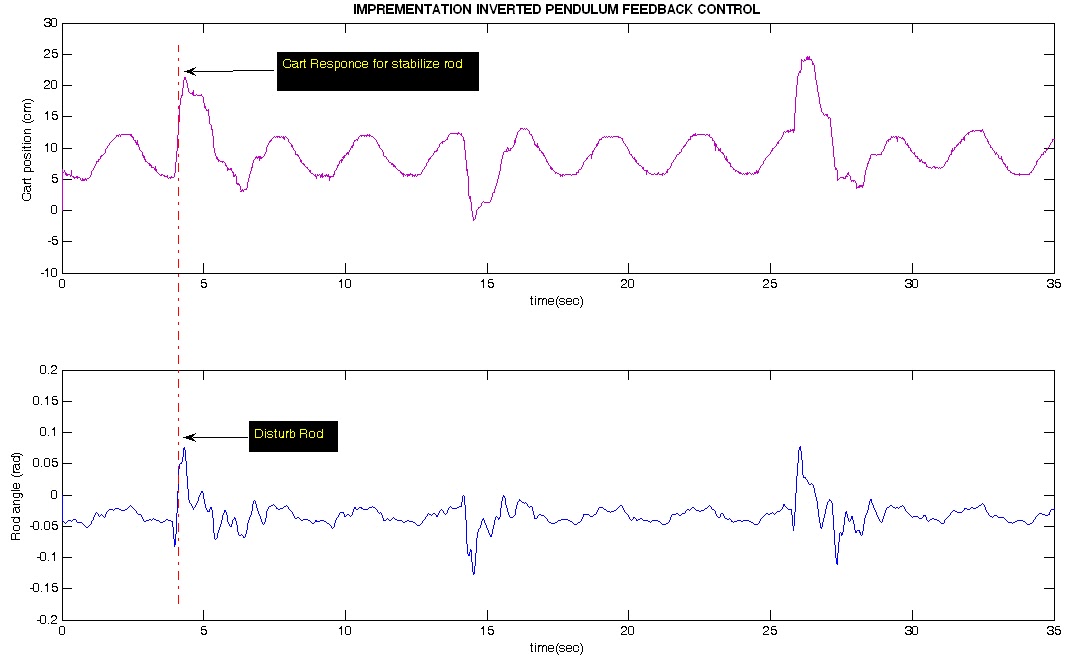
รูปที่.3 กราฟวัดการตอบสนองของระบบ เมื่อมีการรบกวน Rod จะเห็นได้ว่า Cart จะต้องวิ่งเพื่อกำจัด error ที่เกิดขึ้นกับ Rod หลังจากนั้น Cart ก็จะกลับมาที่ตำแหน่งที่ออกแบบ
สนใจติดต่อ: sarayuthassa@gmail.com
083-4391356
083-4391356